
Projects
Main engineering projects showcasing innovative solutions and technical expertise.
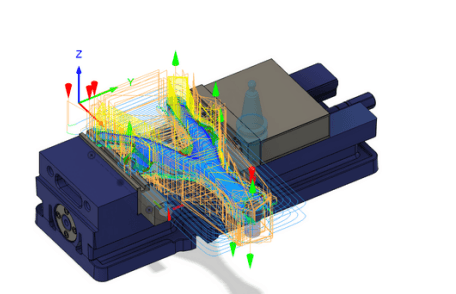
Generative Designed Aluminium Bike Crank
Lightweight bike crank designed using generative structures, manufactured via CNC (Haas UMC-750) and FDM (Ultimaker S5), with full sustainability, cost, and CO₂ analysis.
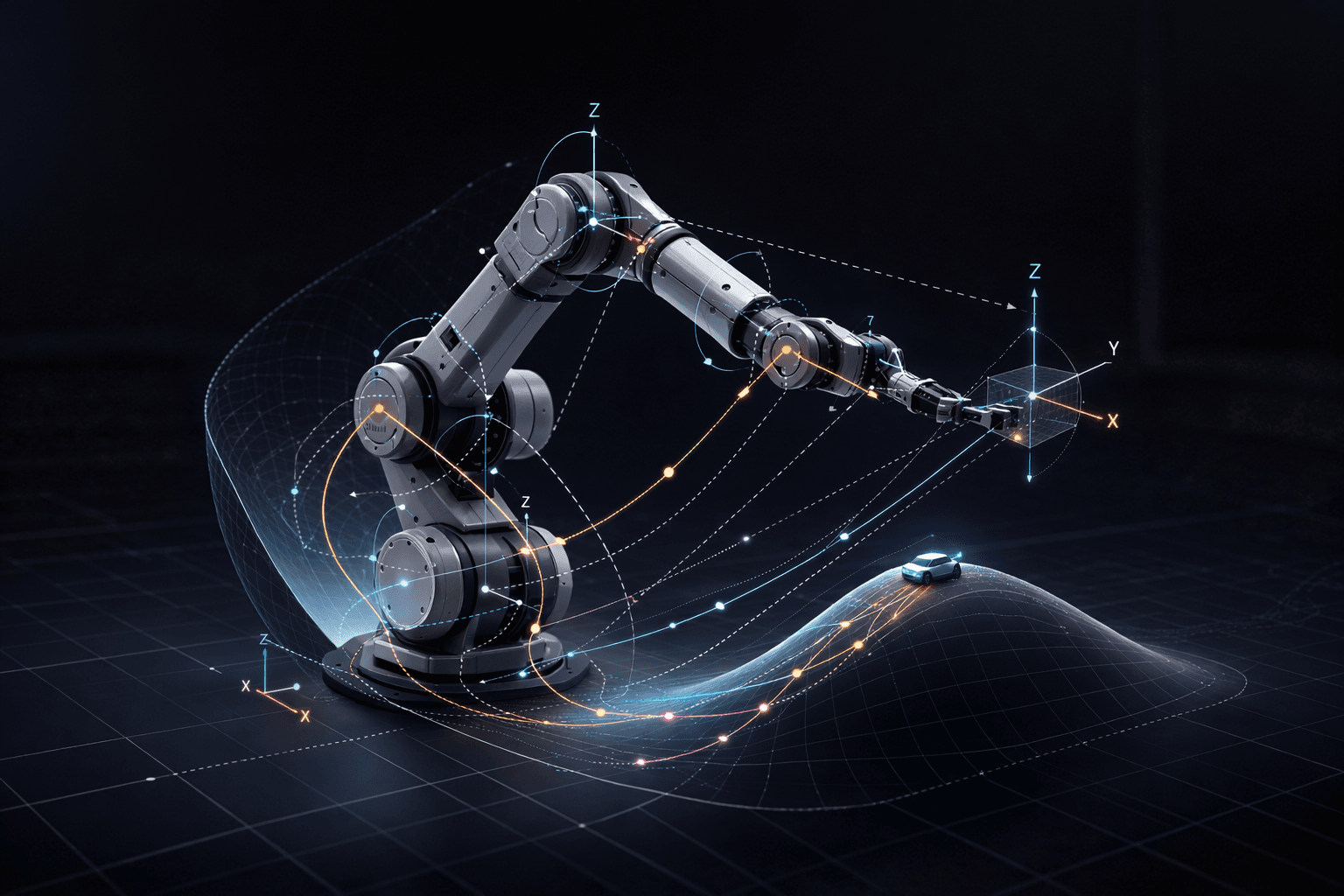
Robot Kinematics
Analysis and implementation of forward and inverse kinematics for robotic manipulators, including trajectory planning and joint space optimization.
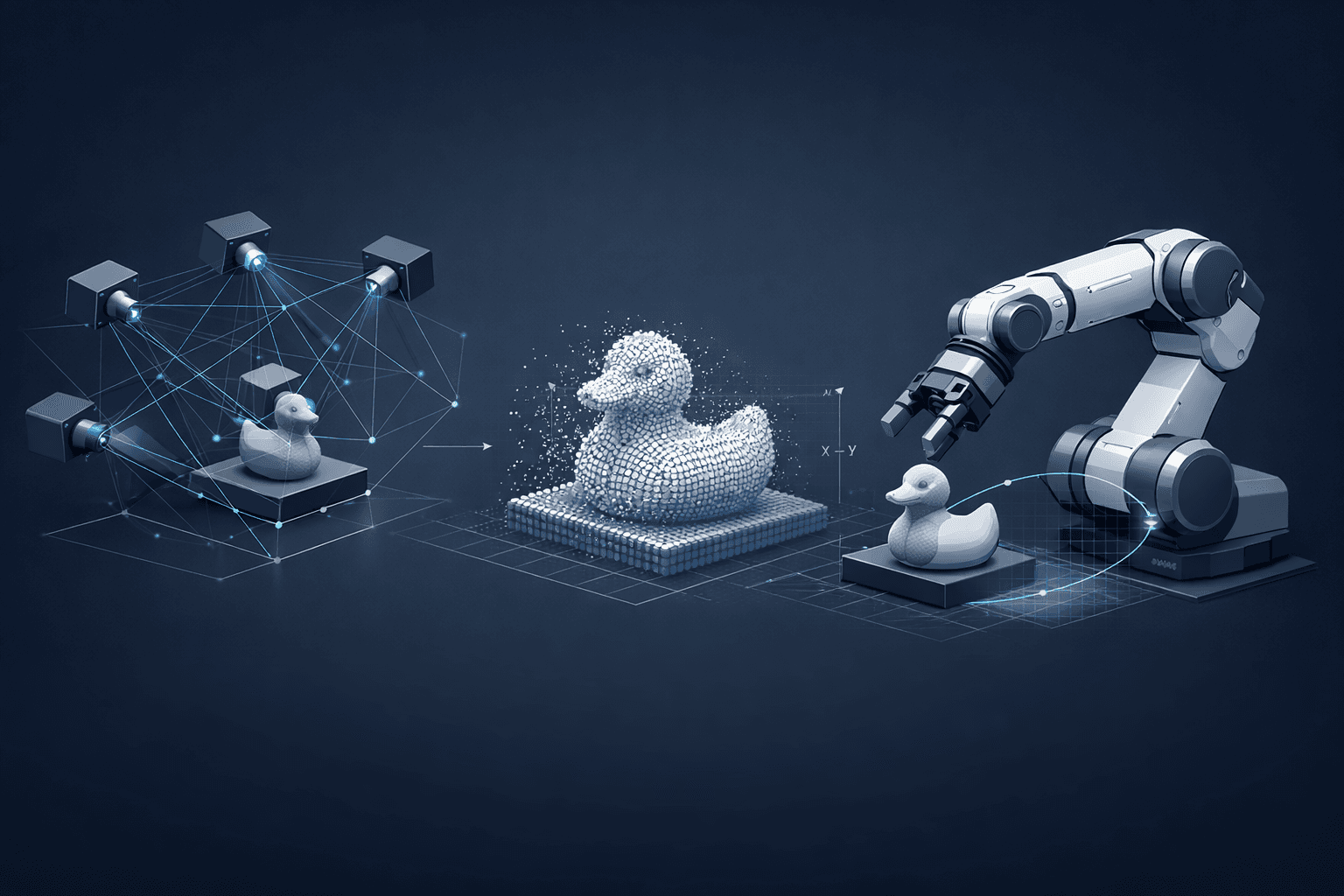
3D Reconstruction & Robotic Manipulation Pipeline
SfM using SIFT, NNDR, E-matrix estimation, triangulation, and MuJoCo robotic interaction.

6-Bit ALU — Gate-Level VHDL & FPGA Implementation
Gate-level ALU with ripple-carry adder, two's complement subtraction, and Basys3 hardware testing.
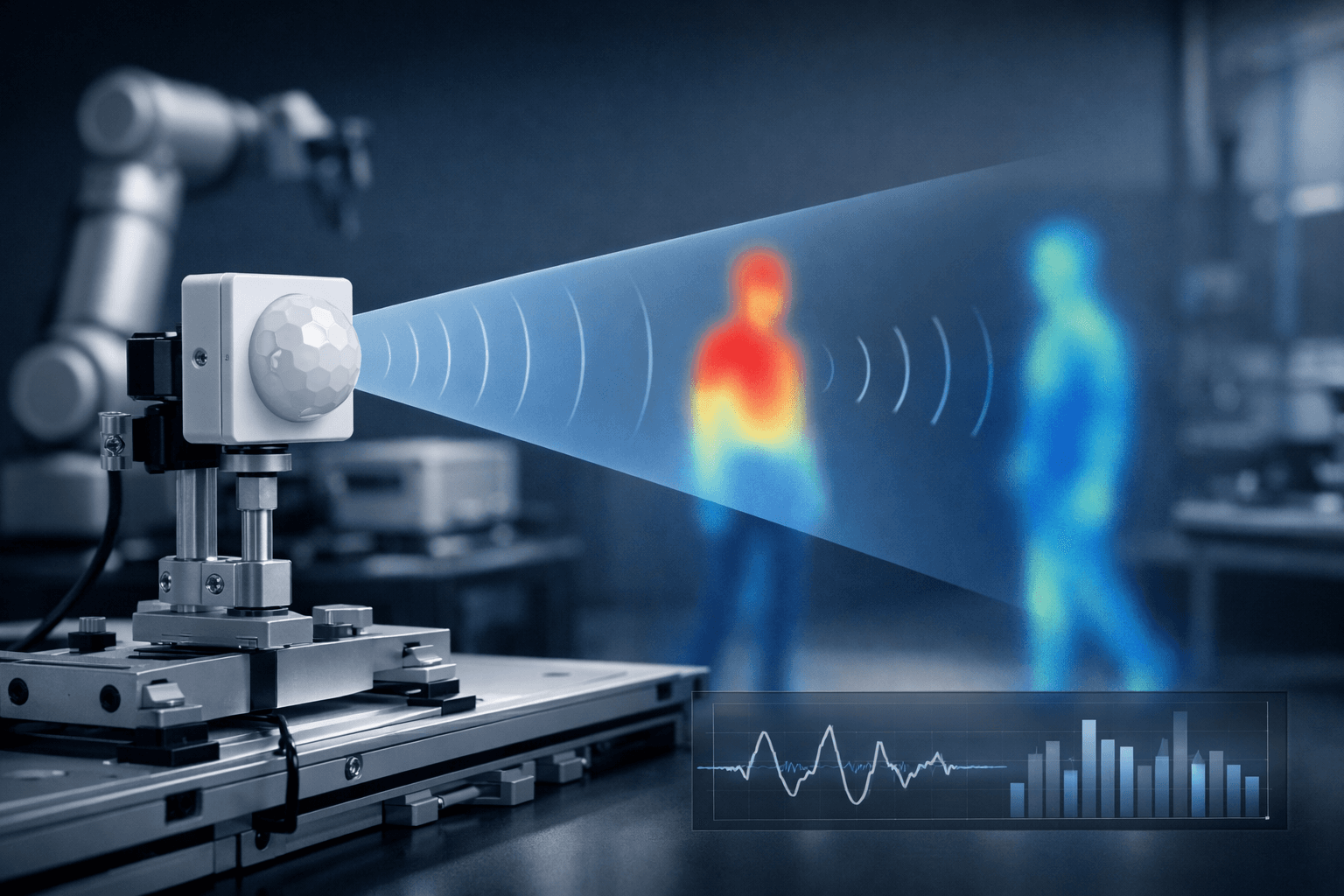
PIR Motion Sensor Performance Study (Group Project)
Experimental analysis of PIR sensor accuracy, angle response, false positives, and environmental sensitivity.

Undergraduate Thesis — Autonomous Human Behaviour in Dyadic interactions
Independent research project in advanced robotics / ML techniques.
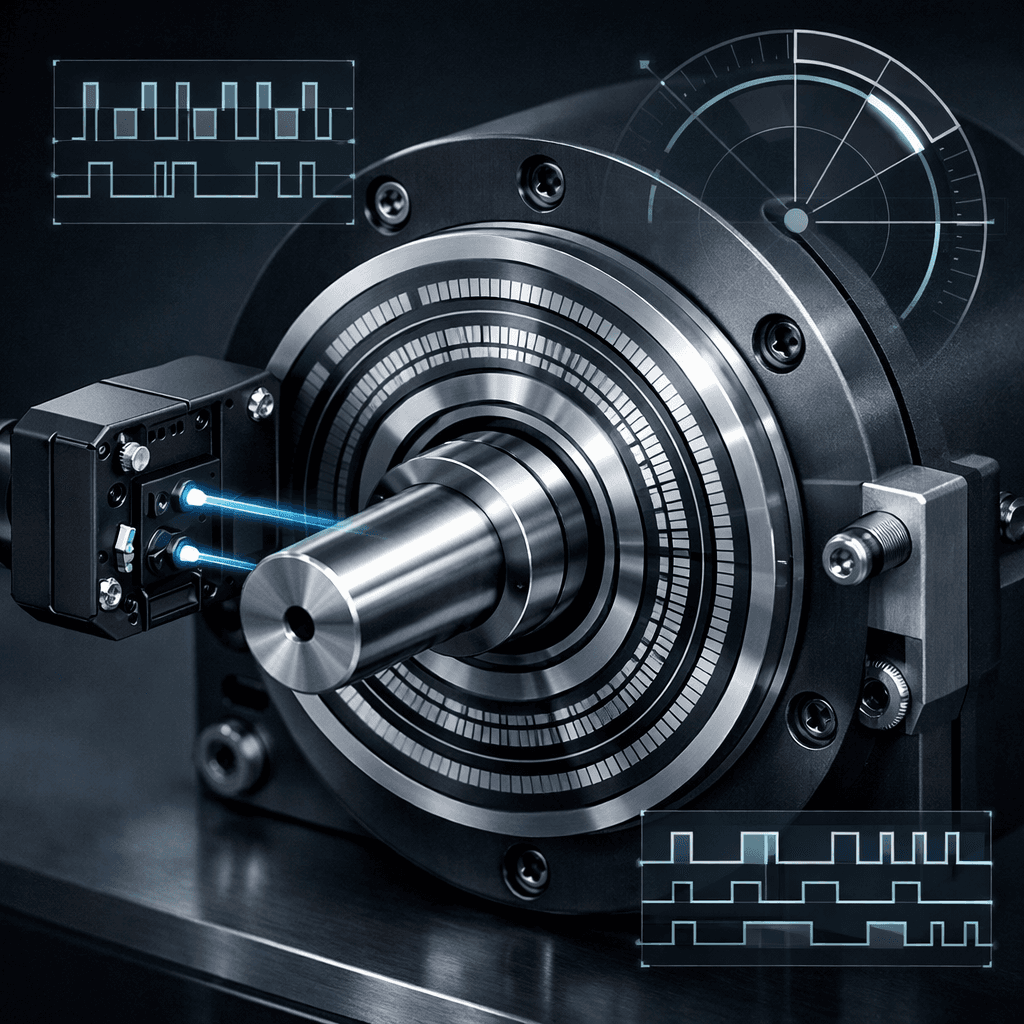
Absolute Optical Encoder System — Group Project
Designed and tested an absolute optical encoder with IR sensors, binary-angle mapping, and Arduino-based real-time speed and position measurement.

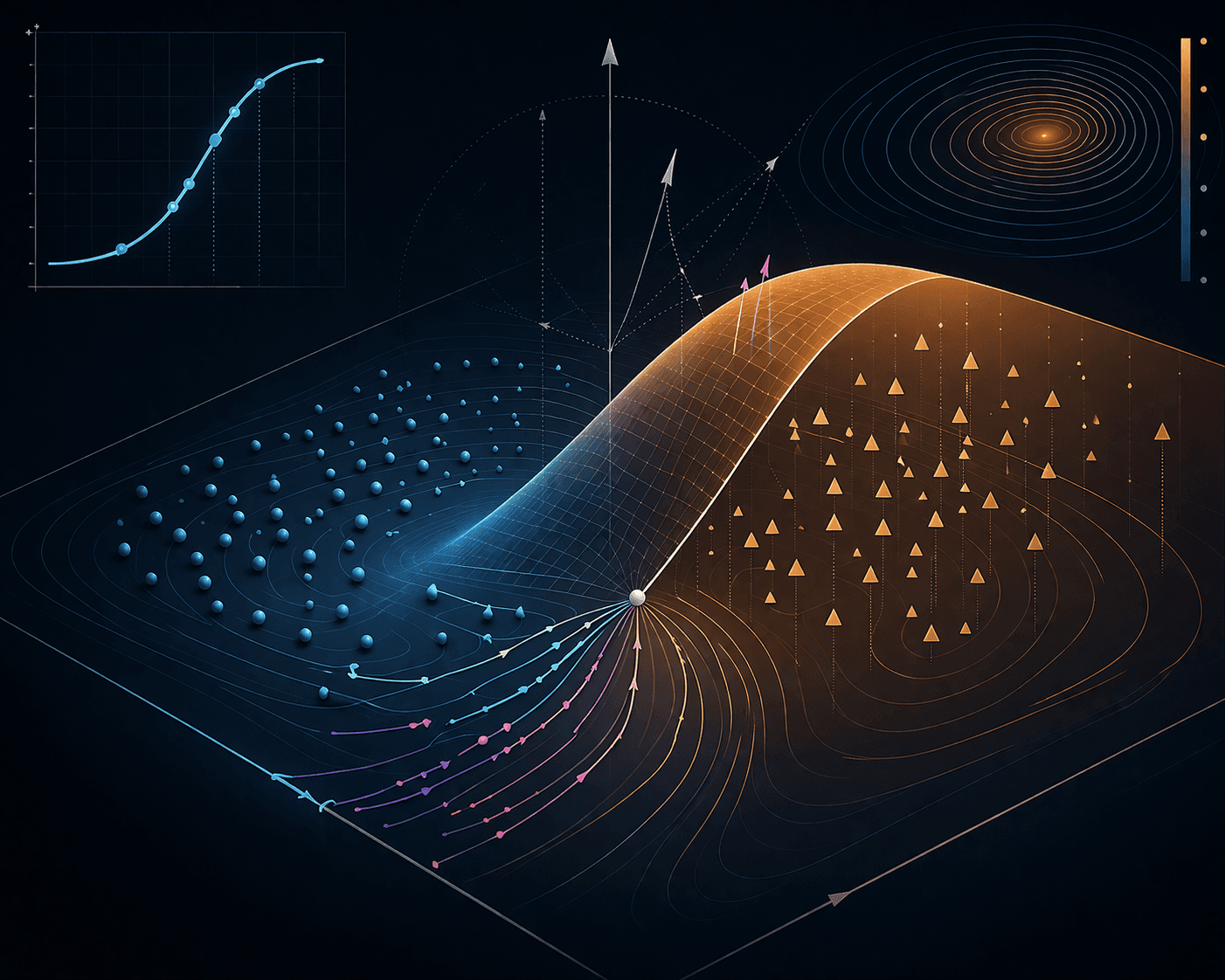
Mountain Car Optimisation — Search & Evolutionary Algorithms
Implemented and compared BGA, PSO and (1+1) ES for the Mountain Car problem using penalised cost functions and optimisation constraints.
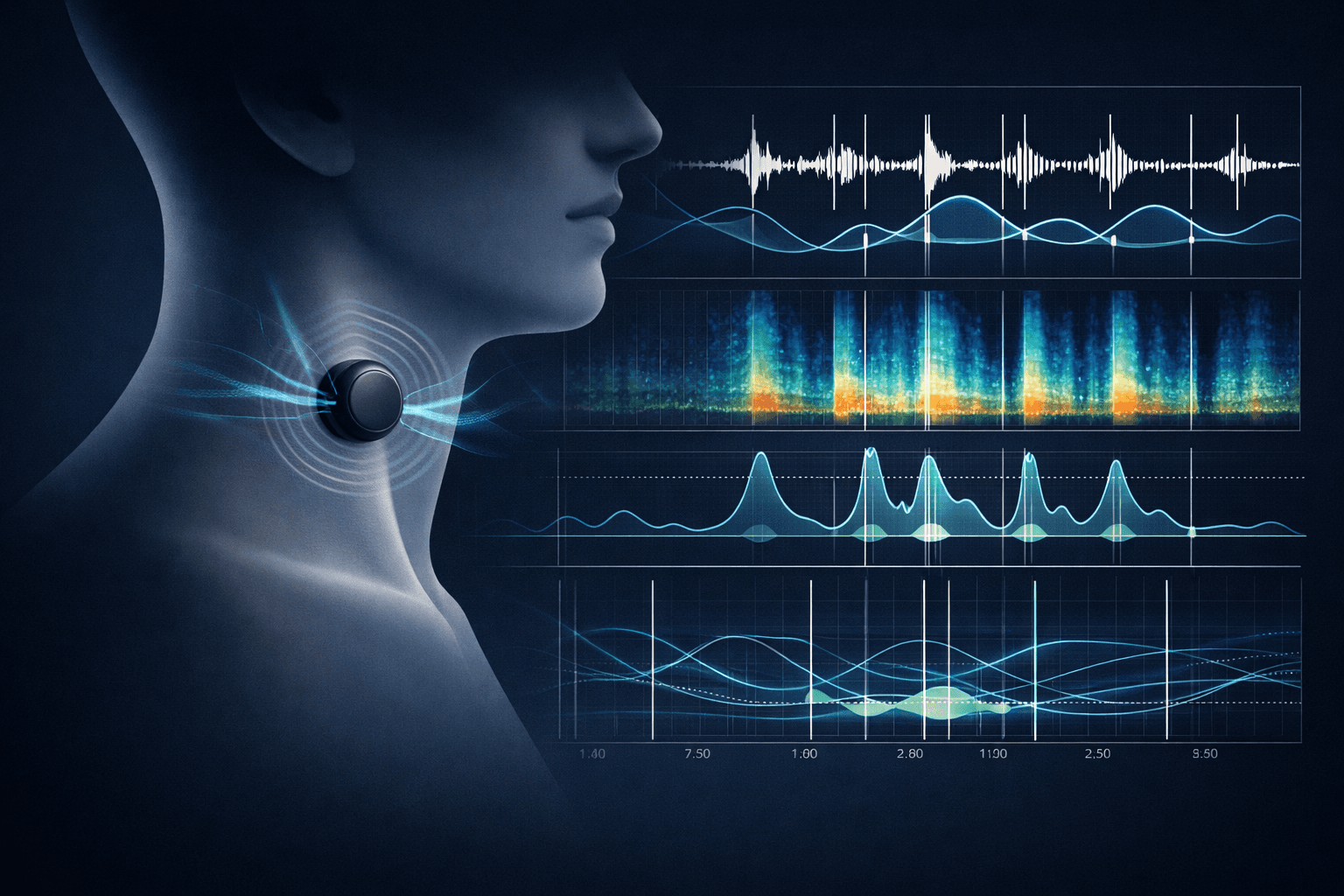
Acoustic Swallowing-Event Signal Analysis — Group Project
Signal-processing study of swallowing, coughing, and throat-clearing events using MATLAB time-domain, spectral and correlation analysis.
Spam Detection — Logistic Regression & Neural Network (CW2)
Binary spam classification from word-count features: NumPy implementations of logistic regression and a ReLU hidden-layer network, with training curves and comparisons.
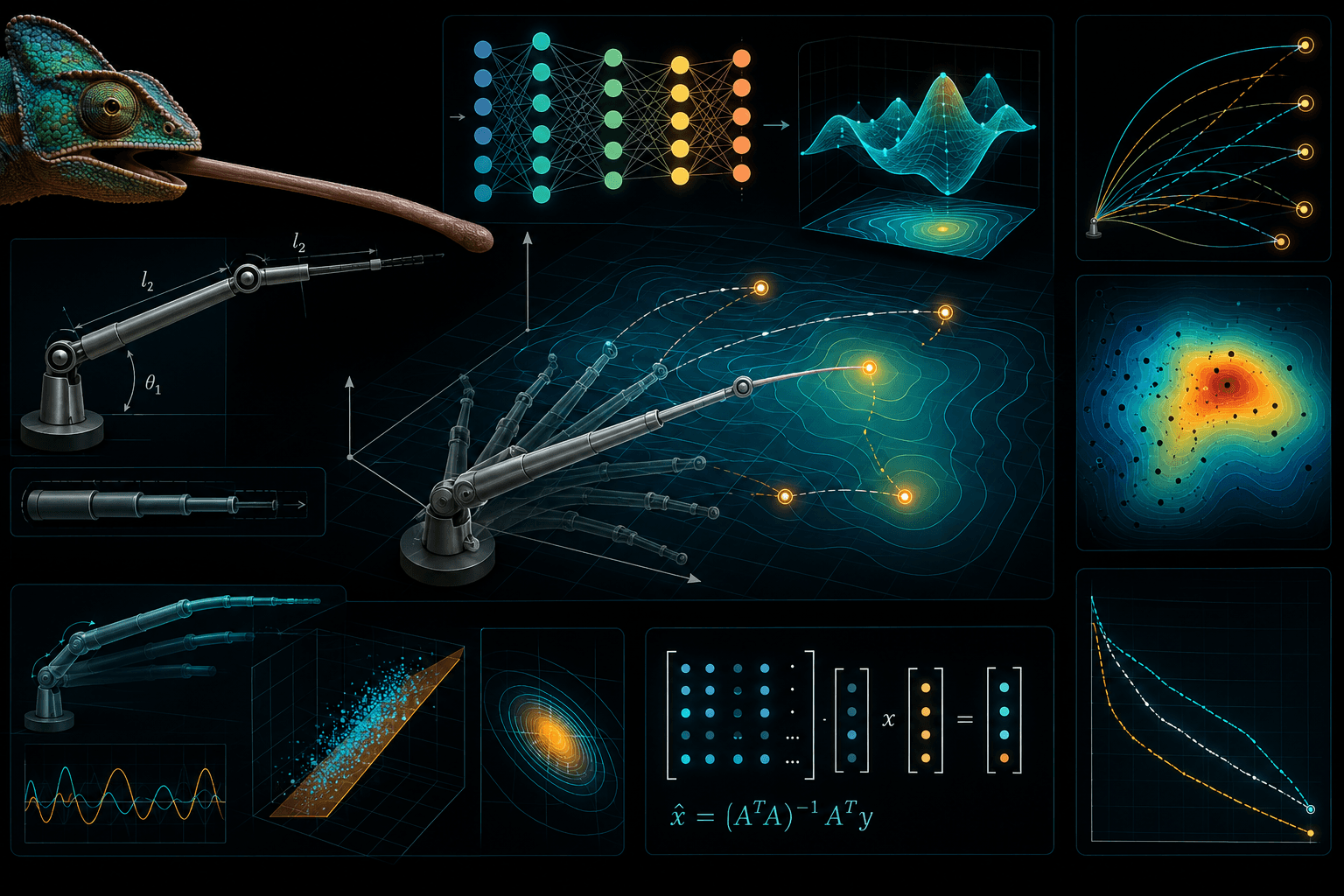
Chameleon Tongue — Inverse Kinematics & Mass Identification
Two-link tongue model learning to catch insects: MLP inverse kinematics, catch-probability evaluation, and tongue-mass identification from manipulator dynamics.
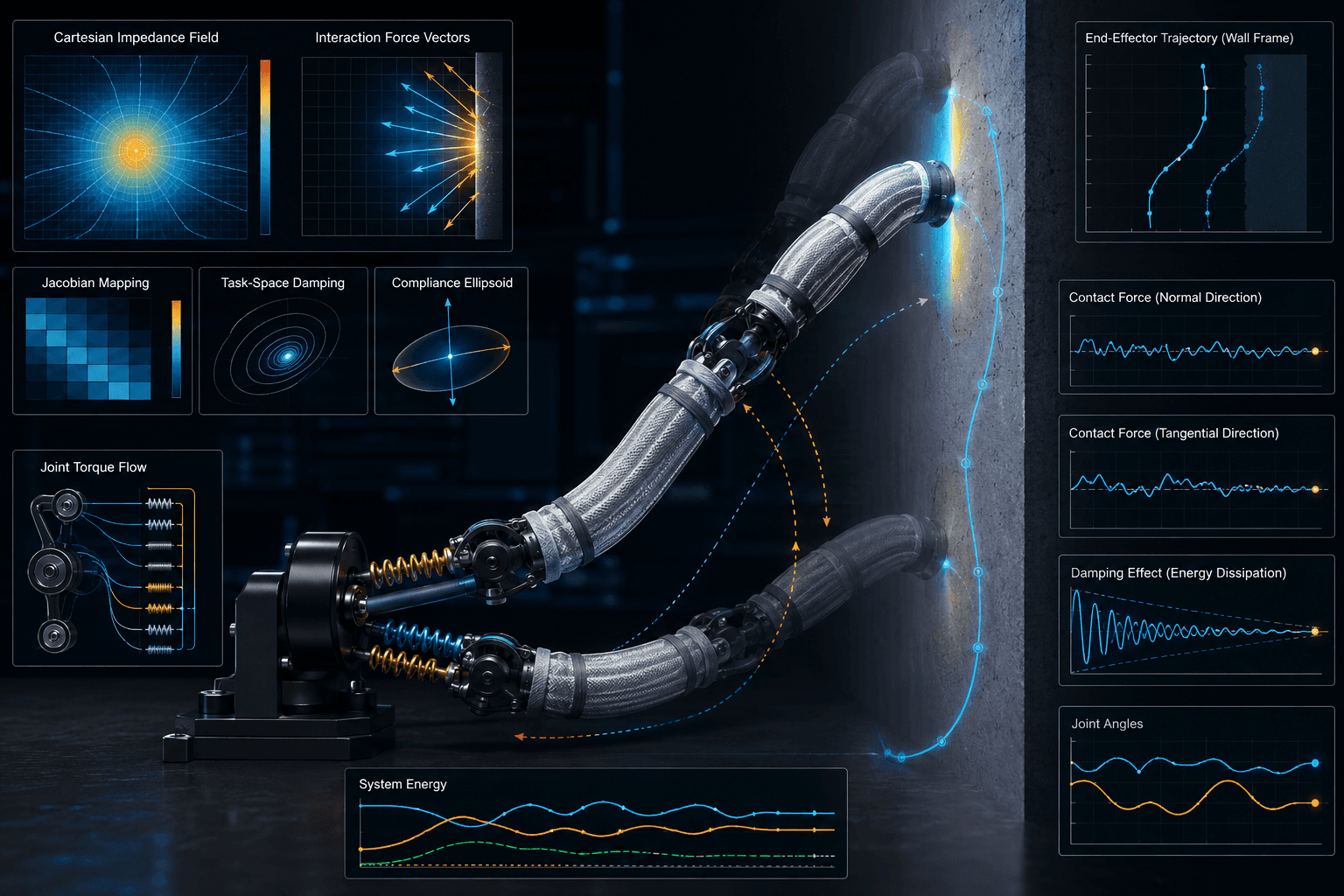
Articulated-Soft Robotic Manipulator — Modelling & Impedance Control
Dynamical modelling and control of a 2-DOF underactuated flexible-joint manipulator in Drake: Cartesian impedance control, Jacobian-transpose force mapping, and a wall approach–contact–slide task with bounded interaction forces.

Skylark-30 — Agricultural & Forestry Surveillance UAV
Fixed-wing catapult-launched surveillance UAV: Eppler E214 aerofoil selection, OpenVSP/VSPAERO aerodynamics, MATLAB longitudinal stability and V-n envelope, and Fusion 360 FEA of the CFRP wing.
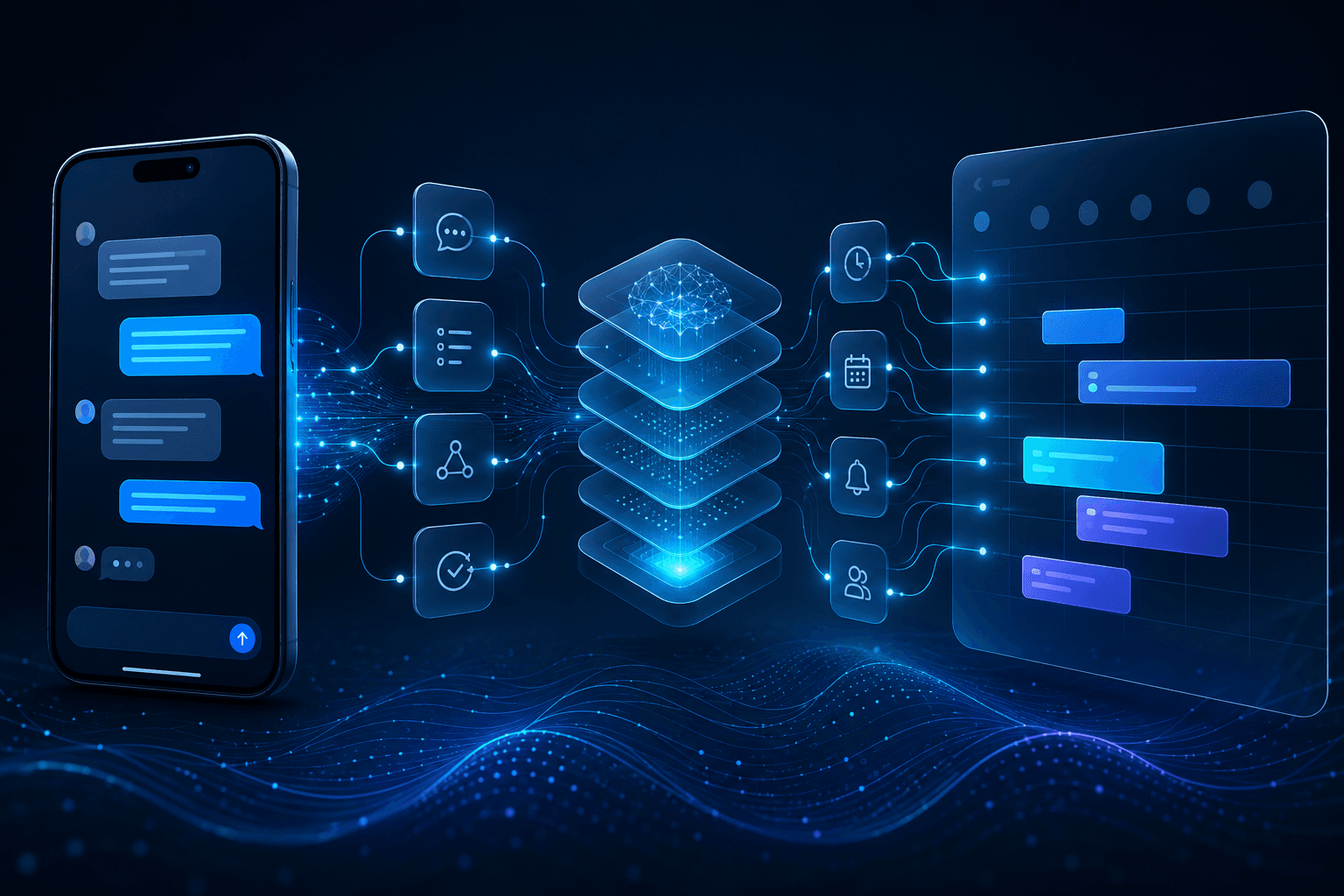
plannerAgent — Telegram Calendar Bot with NLU
Self-hosted Telegram bot that turns natural-language messages into Google Calendar events and reminders — FastAPI + OpenAI NLU + hardened systemd deployment on a personal Ubuntu VPS.
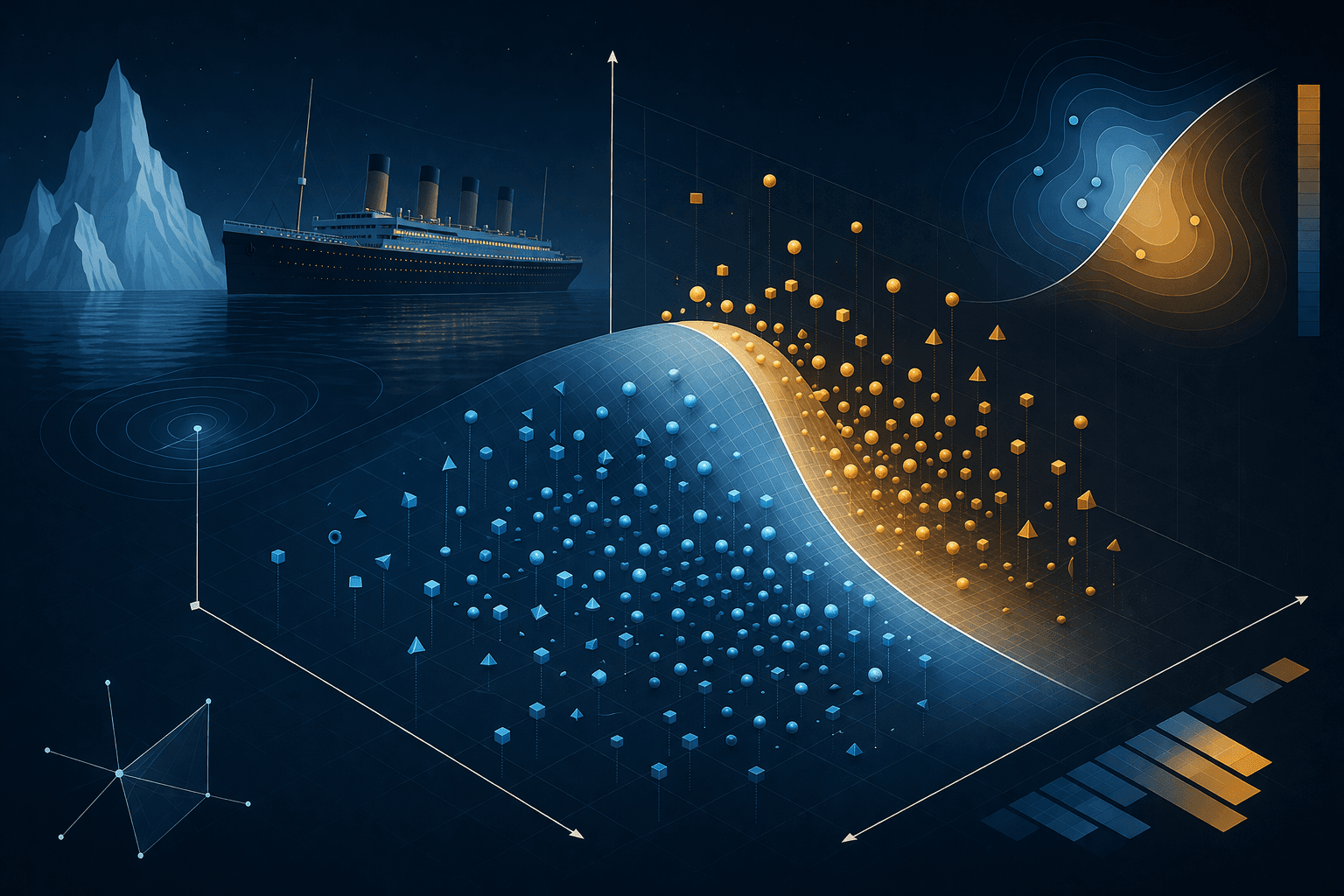
Kaggle — Titanic Survival Prediction
Compared logistic regression, decision trees, gradient boosting, XGBoost, and random forest on the classic Titanic dataset. Random Forest chosen for best bias-variance tradeoff — ~82% CV accuracy.

UniBots — Autonomous Ball Collection Robot
Competition stack on Raspberry Pi 5: OpenCV ball vision, motor and servo control, AprilTag docking, and multiprocess match timing — reactive navigation from camera to pick, store, and unload.
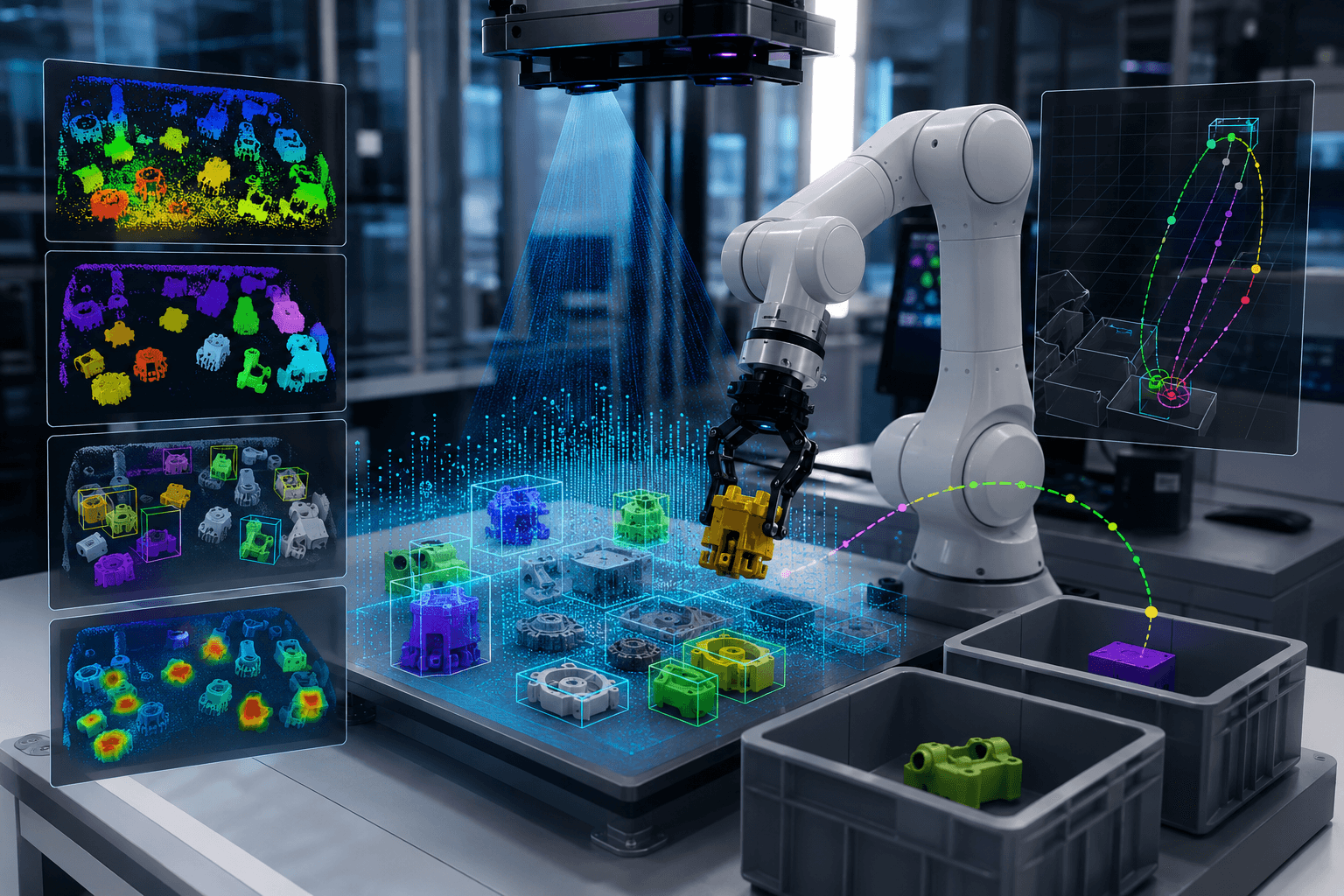
RoboCup ARM Challenge — Autonomous Pick-and-Place Grasping System
King's College London Group 17 entry to the RoboCup Autonomous Robot Manipulation Challenge: an end-to-end UR5e pick-and-place system in MATLAB–ROS–Gazebo combining YOLOv8 detection, PCA + ICP grasp-pose estimation, defensive inverse kinematics, and a deterministic 7-stage state machine — 100% end-to-end success on the standard object set.
Crypto Analyser — Rule-Based Market Decision Engine
A quantitative, rule-based market-analysis and decision-support system for crypto and FX: 10 transparent signal rules, full backtesting with no look-ahead bias, a Telegram bot front-end, and an ML pipeline in active development.