
Articulated-Soft Robotic Manipulator — Modelling & Impedance Control
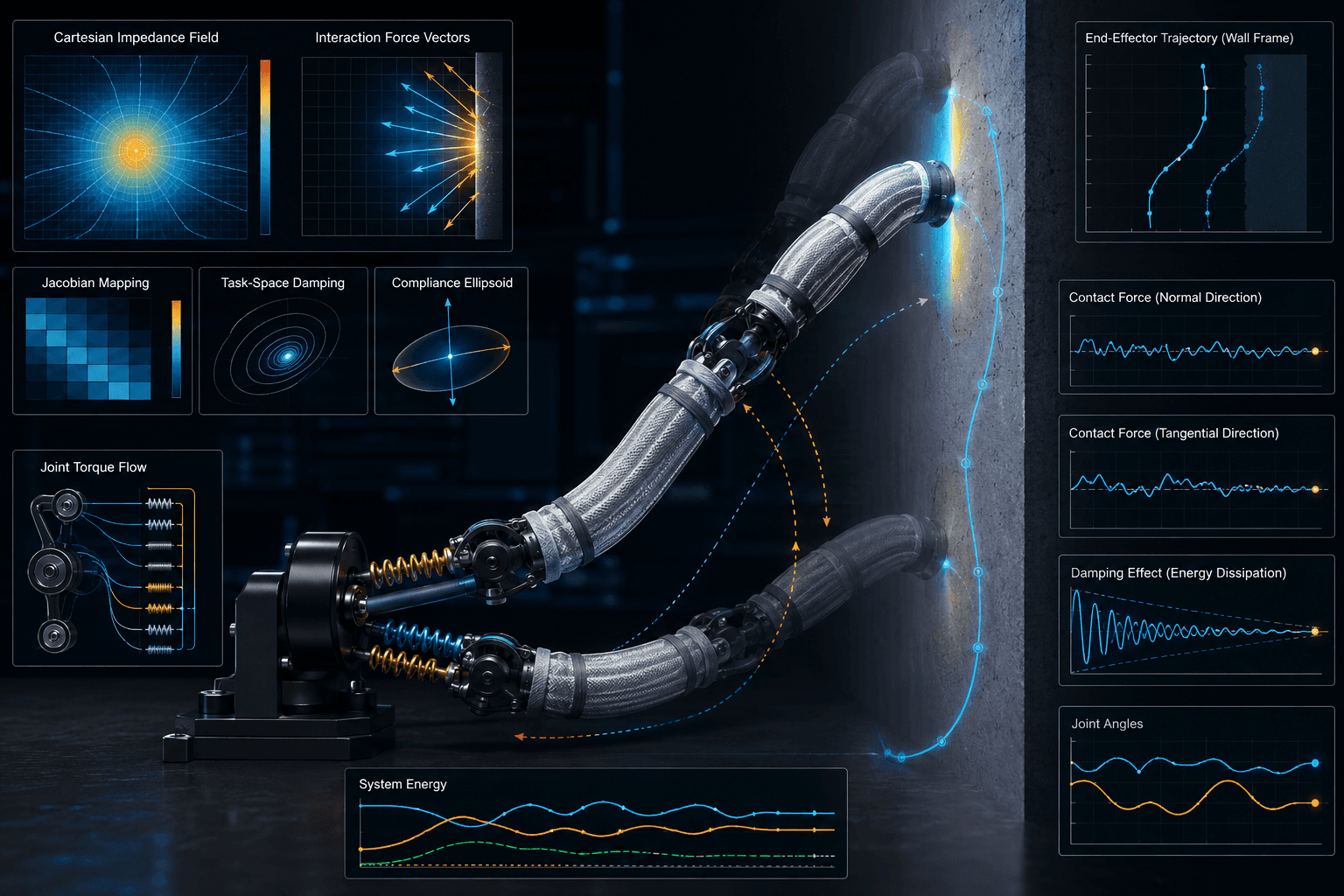
Dynamical modelling and control of a 2-DOF underactuated flexible-joint manipulator in Drake: Cartesian impedance control, Jacobian-transpose force mapping, and a wall approach–contact–slide task with bounded interaction forces.
Project Overview
King's College London 7CCEMRDC (Robot Dynamics & Control) MSc coursework. The system is a planar 2-DOF articulated-soft manipulator with motors elastically coupled to the links, making it underactuated with flexible-joint dynamics. The controller combines Cartesian impedance control (a virtual end-effector force mapped to motor torques through the Jacobian transpose), joint-space PD with wrapped-angle error, model-based gravity compensation, and motor/spring damping to suppress the elastic mode. A Lyapunov argument on the task-space error establishes a dissipative, convergent closed loop. The manipulator is evaluated on a wall-slide task — approach, establish stable contact, and slide ~30 mm vertically while keeping wall displacement bounded near the 10 mm limit. Practical safeguards (torque saturation, rate limiting, low-pass filtering, and wall-normal force clamping) ensure stable contact. Implemented in a PyDrake simulation environment.