
Back to Projects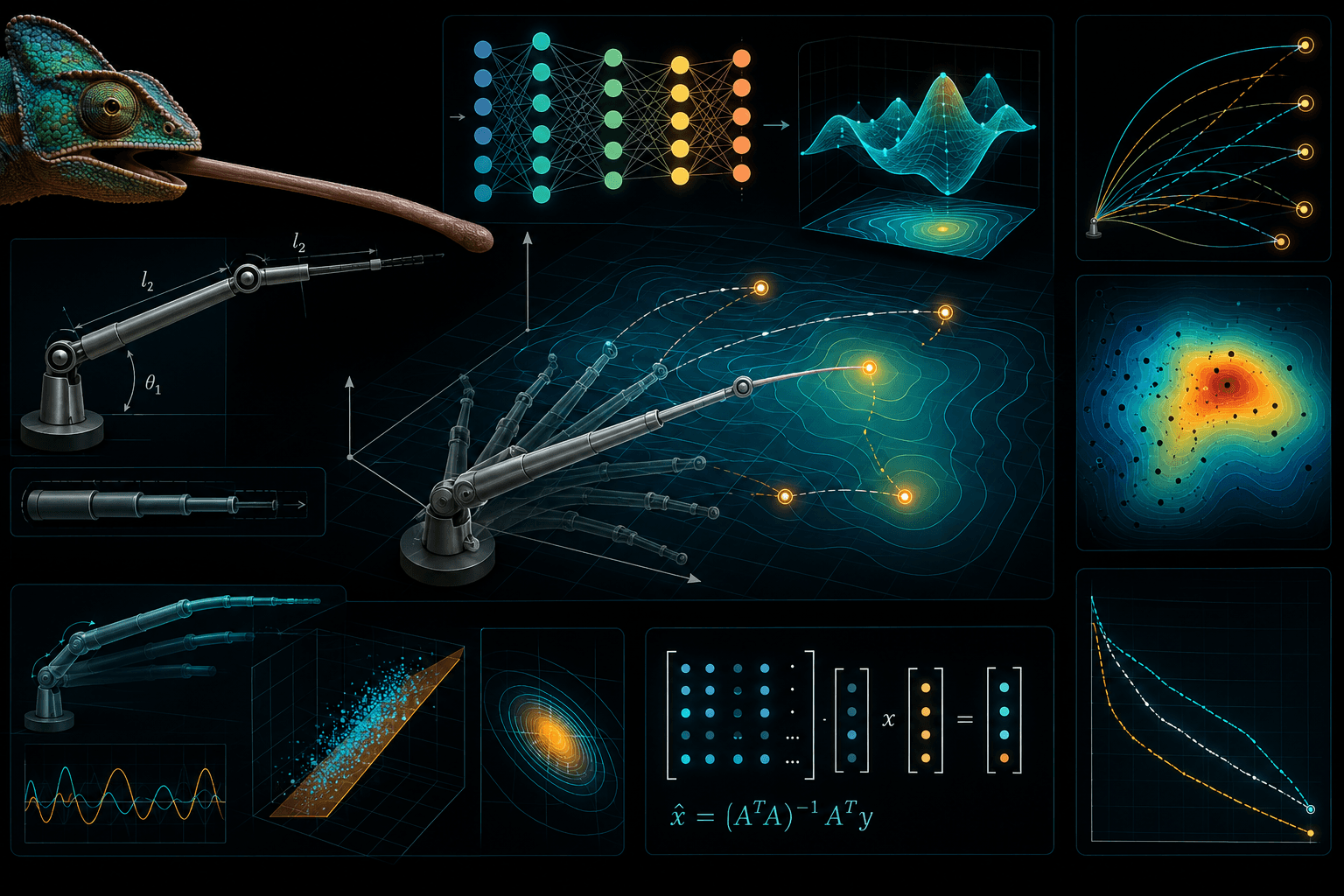
Machine LearningRobot Dynamicsscikit-learnParameter IDMSc Coursework
Chameleon Tongue — Inverse Kinematics & Mass Identification
Two-link tongue model learning to catch insects: MLP inverse kinematics, catch-probability evaluation, and tongue-mass identification from manipulator dynamics.
Year: 2026Category: Machine Learning
Project Overview
MSc Robotics coursework (7CCEMIAA Intelligence and Autonomy). The chameleon's tongue is modelled as a 2-DOF planar arm. A multi-layer perceptron learns the inverse mapping from target location to (angle, length); accuracy is measured both as task-space RMSE and as the probability of landing inside a 1 cm prey radius. The tongue's mass is then recovered from observed dynamics by rewriting the equations of motion in linear-in-parameters form and solving by least squares. Implemented with NumPy and scikit-learn only.